


一种全方位护理移动机器人的结构设计与运动学分析
2016-9-22 来源: 天津工业大学机械工程学院 等 作者: 贠今天 武爱华 桑宏强
摘要: 针对需要护理的环境背景及机器人的作业要求, 提出了一种全方位护理移动机器人的设计方法, 运用solidworks 进行了各部分结构初期设计,并在ADAMS 中对该虚拟样机进行了动力学仿真,完成了对选型的电机进行了验证;利用D-H 方法建立了机器人上肢单臂运动学模型,得到了机器人的运动学正逆解;通过对上肢双臂建立两杆避碰模型,提出了两种相碰的检验条件,选出了最佳检测避碰方案,解决了约束条件下双臂的逆运动学问题;在Matlab 环境下,利用蒙特卡罗法计算出工作空间,为确定机器人构形、参数和杆长的优化提供了依据;基于移动机器人在特定环境中的运行稳定性、应用范围、承载能力等特点,对机器人下肢移动方式进行了优化选择,采用全方位移动的完整约束Mecanum 轮结构并建立下肢运动学模型,通过对其逆运动学速度雅可比矩阵秩的计算,结合具体结构的分析,优选出四轮全方位运动系统的最佳结构布局形式,提高了机器人运动过程中的稳定性.
关键词: 全方位护理;护理机器人;移动机器人;结构设计; 运动学分析; 双臂逆解分析; 工作空间
日本护理移动机器人技术一直处于世界领先地位,2010 年,日本研制出了护理机器人RIBA,它的链路长度、关节配置和可移动关节的范围由计算机执行模拟抱人的数据和基于经验结合得到,采用了耦合驱动器的机制, 提高了REBA 的负重性能和抱取能力,不再仅仅局限于轻重量的假人,而能够真正的抱取真人;2014 年10 月,美国首次将现有双足机器人进行结构重组和功能改造,首次运用到对抗埃博拉病毒当中.中国在护理方面的移动机器人研究很少,典型的是在2003 年非典期间研制了一台取名为“爱姆”的机器人,身高半米左右,“身手”十分敏捷,该非典机器人可以代替医护人员在病区查房,为病人送药、送饭及运送生活用品等,但是该机器人造型简单,没有手臂,不能完成直接和病人接触要求, 比如抱取病人动作. 护理服务机器人是要融入人们生活的消费品,其对外观造型、安全性、人机界面等都提出了更高的设计要求[2].
鉴于护理移动机器人的使用环境是在病房内,空间比较狭窄, 根据作业要求, 本文提出了一种具有5个自由度的上肢结构和具有全方位、完整约束性能下肢的机器人,并对其建立数学模型,求出单臂机器人运动学正逆解及完成双臂协调运动时的逆解分析,最后运用蒙特卡罗方法, 做出机器人运动空间范围图,根据下肢全方位运动条件,优选出四轮全方位运动系统的最佳结构布局形式.
1、机械结构设计
设计此类机器人基本需要4 个步骤[3]:①创建一个设计结构规范;②机器人躯干及下肢设计;③机器人驱动选择;④灵活控制所需要的传感组件.
根据人体比例,确定了该机器人的外形尺寸[4]:身高1 410 mm,身宽340 mm,上臂长777.36 mm,下臂长300 mm,下肢长860 mm. 不同国家和地区的人体比例各不相同,这里仅以此作为仿人机器人外形尺寸的参考,如图1 所示,结构由头部、上肢、左右臂、腰部、下肢组成. 该机器人最突出的优点是具有巨大的承载能力,满足本文设定的负载75 kg 的要求. 以下将对各主要部分进行分析.

图1 机器人整体结构图
1.1 上肢设计
本文机器人上肢体包括腰部、躯干、头部及双臂4 个部分, 机械结构设计方案采用18DOF 的形式:腰部1 个俯仰自由度,头部1 个旋转自由度,单臂4 个自由度(肩部1 个内外敛自由度、俯仰自由度、肘部和腕部各1个俯仰自由度)[5-7].
(1)考虑到电机尺寸较大,上臂空间有限,所以将肩部俯仰自由度驱动的部件放置胸腔内,如图2 所示.
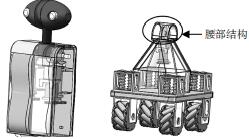
图2 机器人躯干和腰部结构图
(2)上臂部位内部包含2 个小体积的蜗轮蜗杆机构,如图3 所示.
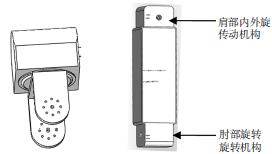
图3 机器人上臂结构图
(3)下臂是病人与机器人直接接触的部位, 不仅安全性至关重要,而且对舒适性和美观度提出很高要求[8],腕部俯仰关节由灵巧手自带,如图4所示.

图4 机器人下臂结构图
1.2 驱动部分设计
机器人的驱动方式主要有气体传动、液压传动和电机驱动,鉴于此机器人的作业环境及要实现抱人要求,在首先必须保证病人的安全前提下,还要克服潜在泄露风险和减少技术上的包装复杂性[9],本文传动部分均采用高紧凑、电动蜗轮蜗杆执行机构,它的优势是:传动比大,工作时比较平稳,噪声低,结构紧凑,不工作时可以自锁, 最重要的的是较大的承载能力,可以满足本文所设定的负载要求.
本文设计大、小2 种蜗轮蜗杆传动机构, 如图5所示. 二者的主要区别在减速比,一种(图5 左)是减速比为44 ∶ 1,体积较大、能为肩部旋转和腰部俯仰提供高达900 N·m 的力矩,另一种(图5 右)是减速比为34 ∶ 1,体积相对较小、能为其他上肢(肩部内外旋和小臂)2个自由度提供450 N·m 的力矩,这2 种传动机构结构紧凑,满足使用需求.

图5 (大、小)蜗轮蜗杆内部结构视图
此次设计的选型大致经过“选型参考—理论估算—仿真验证”3 个过程,通过对关节负载转矩的需求来选出可能的电机型号,电机选型必须满足以下2 个条件:①有效转矩Mrms 必须要比所选电机的连续转矩小; ②所选电机的堵转转矩要大于所需的峰值转矩Mmax,综合考虑,以腰部(如图6)和肘部(如图7)关节为例,经理论估算,腰部和肘部力矩需至少分别满足910 N·m 和150 N·m, 电机分别选用雄克公司生产的PDU70-161和PDU-101,从仿真验证的图中可以看出满足以上2 个条件.
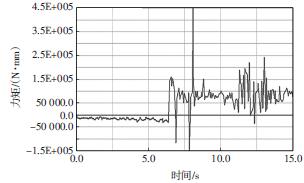
图6 腰部关节力矩

图7 肘部关节力矩
1.3 下肢结构设计
机器人中常见的移动机构[4]有轮式、履带式、关节式、复合式,关节式机构能够提供最佳的机动性能,但其机械及控制系统很复杂,实施成本太高,本文所讨论的是室内环境工作的服务机器人, 路面条件好,而且无需特别大的越障能力,显然采用轮式机构比履带机构更为合适.
综合因素考虑,该护理移动机器人下肢采用全方位移动的完整约束Mecanum 轮结构[10-11],所需的安装空间小、运动非常平稳,承重能力强;根据要求满足机器人实现Mecanum 四轮系统平面上3 自由度全方位运动条件,结合系统的驱动性能和可控性要求,优选出四轮全方位运动系统的最佳结构布局形式[4];在保证机器人在加速的过程中不会倾倒的前提下,结合底盘全向轮的布局和底盘悬挂等因素, 确定了底盘大小;由于机器人采用4 个全向轮的底盘,在平面上很难保证4 个点同时着地或接触不好,为避免出现轮子空转或打滑现象,悬挂设计也不可缺少,整体设计方案如图8 所示.
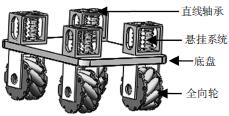
图8 下肢行走结构图
2、机器人运动学建模
2.1 建立坐标系
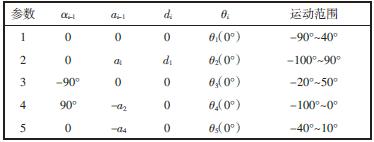
鉴于该护理移动机器人下肢为轮式结构,在运动学求解中下肢可作为基坐标系,采用D-H 方法对机器人上肢建立坐标系(考虑肩部2 个旋转轴距离较近,将其按照相交来建系),如图9 所示,连杆参数如表1所示. 假设Ti 为连杆坐标系i 相对于连杆坐标系i-1的齐次变换矩阵. 根据表1 的各连杆参数, 可求得各杆系的变换矩阵及机器人末端在基础坐标系的位姿矩阵.
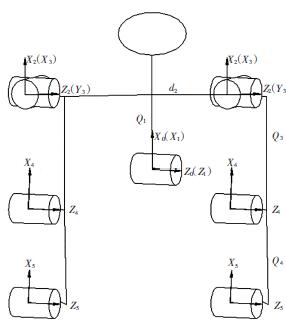
图9 上肢腰部到手腕机构和坐标系简图
表1 机器人上肢连杆参数表


2.2 单臂正运动学分析
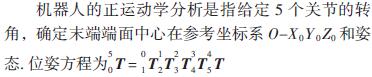
式中左端项表示末端端面中心的位置和姿态, 右端每个齐次变换矩阵即

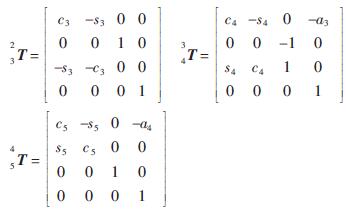
式中: a1、a3、d2为已知的的结构参数,若给定3 个关节的转角θ1、θ2、θ3、θ4和θ5, 代入上式就可直接得出手腕末端关节端面中心点的位姿,其中:
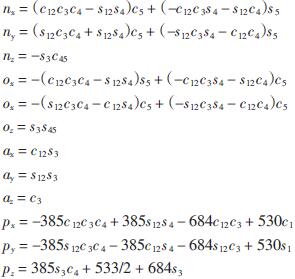
式中:c1 代表cosθ1;s1 代表sinθ1;c12 代表cos(θ1 + θ2);s12代表sin(θ1 + θ2). 以此类推.
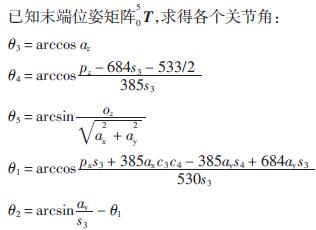
2.3 单臂逆运动学分析
执行抱取或抓取任务时,目标相对于O-X0Y0Z0坐标系的矢量方位可以经过测量达到,假设已知此时目标相对于基坐标系的末端位姿. 要确保任务完成,就需要知道各关节的角度值,这是机器人的逆向运动学的求解.
2.4 双臂逆运动学的分析方法
2条机械臂在同时运动的情况下, 则必须考虑2臂的位置约束,使其不发生碰撞,这就需要通过建立两杆模型,用碰撞的约束条件[13]对分别对求得的运动学逆解进行取舍或寻优.
(1)第1 种分析方法. 把左、右臂杆简化为空间相错的两线段LiLi-1和RiRi-1,如图10 所示. 设此两杆在基坐标系中的方向数分别为(ml,nl,ll)和(mr,nr,lr),那么两线段间的最短距离d 为:

式中:(xl,yl,zl)、(xr,yr,zr) 分别为端点Li 或Li-1、Ri 或Ri+1在基坐标系的坐标. 设定不碰撞的距离为γ, 则不碰条件应满足d > γ, 发生碰撞的情况只可能在图10中的第1 种,引入可能发生碰撞的检验条件来求解双臂运动逆解:
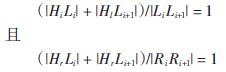
图10 两臂杆的空间线段避碰模型
(2)第2 种分析方法. 把机械臂连杆简化为一条线段,当2 只机械臂发生碰撞时,表示连杆的两条线段相交, 通过检测三角形ABD 和三角形ABC 的环绕方向是否相同可判断点C 和点D 位于线段AB 的两侧.如图11 所示,与线段AB 和线段CD 相交时,三角形ABD 和三角形ABC的环绕方向相反, 三角形CDA和三角形CDB 的环绕方向相反,通过确定2 个三角形的法向向量点积的正负判断2 个三角形的环绕方向是否相反, 点积为负说明2 个三角形的环绕方向相反,反之则相同(规定三角形所构成平面的法向向量的方向根据右手法则确定). 此时,平面法线按下列叉积形式计算:
n =(B - A)×(A - C)
线段AB 和CD 相交则有:
((B - A)×(A - D))×((B - A)×(A - C))< 0
((D - C)×(C - A))×((D - C)×(C - B))< 0
(3)2 种方法比较. 第1 种方法计明显计算量大,实时性稍差, 再者考虑到以后路径规划的实时性要求, 第2 种不失为简单而又快速的碰撞检测方法,也是优先选择的方法.
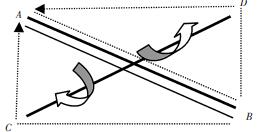
图11 线段相交的图形学检测模型
2.5 工作空间分析
工作空间的大小代表机器人的活动范围,是衡量机器人工作能力的重要运动学指标,可方便快速确定机器人手臂能够到达的空间位置;工作空间是从几何方面讨论机器人的工作性能,分析工作空间是确定机器人手臂的构形和参数必须的过程,为进一步杆长的优化提供了依据[14],也对各关节的轨迹规划提供了一定的理论基础. 根据正运动学分析中的末端执行器的位置方程,利用蒙特卡罗方法(又称统计模拟法)[15],在matlab 中编程, 以打点方式在三维空间中描绘出机器人单臂工作空间,如图12 所示.

图12 机器人工作空间图
3、下肢全向移动系统的运动学模型
对于四轮系统,假设忽略辊子与地面打滑,辊子中心速度voi与轮毂旋转速度wi具有确定关系,因此系统中的驱动变量只有4 个轮毂转速w1、w2、w3和w4,以轮i 为例, 在坐标系xiOi yi中可得轮子转动中心Oi的移动速度,以其中1 个轮子为例,如图13所示.

图13 Mecanum 轮与轮i 的轮体结构图
在坐标系XOY 中可得O 的移动速度:
由上面2 式可得:

同理,对其他轮子进行分析,可得系统的逆运动学方程:令

根据机器人运动学,当逆运动学雅可比矩阵列不满秩时,系统存在奇异位形[9],系统运动的自由度减少.对于本文所论述的四轮系统,由上式可知,如果rank(B)= 3,则系统具有实现全方位运动的能力,如果rank(B)< 3,则系统存在奇异位形,不能实现全方位运动.
4、结论
(1)通过对移动护理机器人作业要求分析,在solidworks 建立了三维模型,在此基础上进行了自由度配置,得出各个模块机构的具体尺寸,并对驱动模块进行了电机的估算选型,对选型的电机进行了验证.
(2)利用D-H 法对上肢结构进行了运动学建模,利用逆运动学求出各个关节角,为今后完成机器人上肢各关节轨迹规划和动态仿真及制作样机机器人奠定了基础; 对上肢双臂建立两杆避碰模型, 提出了2种相碰的检验条件并进行了比较,得出简单而又快速的碰撞检测方法,避免了双臂同时运动时的碰撞情况发生;最后在matlab 中为机器人进行了工作空间分析,对下一步进行个杆件的优化提供参考.
(3)对下肢的移动方式进行选择, 根据选择的轮式结构建立了运动学模型,通过逆运动学速度雅可比矩阵秩的计算,优选出四轮全方位运动系统的最佳结构布局形式.
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

