



在线测量刀具图像调焦特性的镜头对比研究
2020-4-4 来源: 中北大学 机械与动力工程学院 作者:杨芳,杜文华,曾志强,王俊元,段能全,等
摘要: 光学系统是在线高精度视觉测量系统的重要模块,其中远心镜头的引入导致对焦不准、系统复杂度和成本大大提高等问题。文章以实验室搭建的视觉测量系统为平台,采用平行背光源,分别用远心镜头和普通镜头对数控铣刀进行了直径测量。根据清晰度比率、灵敏度、局部极值因子等评价指标对两类镜头环境下的 Tenengrad 函数特性进行对比分析。结果显示,非远心镜头在灵敏度、分辨率和鲁棒性更占优势,高达 35% 左右,而远心镜头具有更好的曲线性,超出 30% 左右。考虑到该在线测量系统应用于复杂工业环境中,应选择分辨率、灵敏度和鲁棒性均占优势,且成本更低的非远心镜头。
关键词: 在线测量; 刀具; 图像; 调焦评价函数
0 引言
随着机器视觉和视觉机器测量要求的不断提高,测量系统调焦环境的好坏对整体系统测量精度的影响至关重要。调焦模块的对焦问题离不开镜头的选择,远心镜头和普通镜头二者的工作景深、透视变形、调焦精度和价格成本等无法平衡。
目前国内外实验室研究和制造企业生产的视觉测量系统设计研究中,不少学者从不同角度提出不同的调焦评价函数来对图像的清晰程度进行评价,现提出的评价函数有几十种,主要从灵敏度、单调范围、无偏性、信噪比和局部极值因子等指标对聚焦函数的性能进行评定,其调焦模块考虑具有较大的工作景深和消除透视变形以及由于透视变形产生的被测物遮挡的情况,采用远心镜头,但是随之会造成较大的成本提高,对于大批量产品来说会造成较大的成本提升。
本文从保证调焦函数的特性出发,对所获图像的调焦函数曲线特性进行评价,拟通过多项性能的比较,在同一测量精度和调焦要求下,发现非远心镜头代替远心镜头的可能性。研究中所涉及的在线测量相关问题,将扩展现有视觉测量技术的研究范围和深度,对不同测量任务所需调焦模块的设计研究具有重要的理论意义。此外,相关研究成果对于满足同一精度动态测量工况的镜头选择具有重要工程应用价值。
1、 图像调焦函数理论分析
一个理想调焦曲线,在正焦位置的图像有着很尖锐的边缘,而在图像处理中,常用梯度函数来提取图像的边缘信息,因此可以选择梯度函数来作为图像清晰度评价函数。图像的清晰程度与其梯度值成正相关,边缘越锋利,梯度值越大,则图像越清晰。
在自主开发的在线刀具测量系统中,被测对象主要是铣刀,一般来说图像的灰度变化比较均匀,刀具边缘图像部分存在一定的过渡区,即该刀具的图像在边缘边界位置灰度值变化不是很剧烈,本文选用聚焦函数值变化明显的 Tenengrad 函数作为视觉测量系统调焦模块的调焦评价函数。
Tenengrad 函数是先通过使用 Sobel 算子对图像进行边缘检测,然后计算图像的梯度值,它包括水平和垂直两个方向的梯度值,分别用水平模板和垂直模板来提取。然后可利用 Tenengrad 函数来计算图像清晰度,该函数的计算式[7]如式 ( 1) 、( 2) 、( 3) 所示:
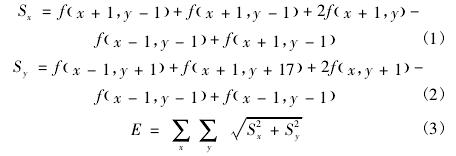
在式( 1) ~ 式( 3) 中,Sx和 Sy分别是水平、垂直方向的梯度值,f( x,y) 是图像中某一像素点( x,y) 的灰度值,E 是评价函数。
图像清晰度评价函数的特点: 由光学原理可知,当成像目标处在焦平面时所成的像是最清晰的,在其它位置都不清晰,并且离焦平面越远,图像越不清晰,因此可以用图像的清晰程度来表明测量系统所成像目标的离焦、正焦程度。图像清晰度评价函数曲线特性主
要通过下面五个评价指标进行定量评估[8-10]。
( 1) 清晰度比率大小表征调焦评价函数离焦时的分辨率强弱,其值用 R 表示。

式中,分子表示调焦评价函数的极大值,分母表示其极小值。
( 2) 灵敏度强弱表征评价函数曲线变化的剧烈程度,其值用 SEN 表示。

式中,f (zmax+ε) 是评价函数曲线的 x 轴变化为 ε 时的函数值,ε 是调焦评价函数值发生突变时 x 轴的改变值。
( 3) 局部极值因子大小表征曲线平缓区的陡峭程度,大小用 LEF 表示。


2 、实验系统搭建
本文采用自行研发的高精度视觉测量系统实验平台来采集图像数据。实验平台如图 1 所示,其主要性能参数如下: 图像采集系统采用 CgImageTech 相机,相机传感器尺寸 2 /3 inch,分辨率 1392 × 1040 pixel; 光路系统采用镜头 a( Computar 非远心镜头) ,镜头 b( 艾菲特 BT-2316 远心镜头) ,采用平行背光源照明。测试条件如下,CPU: Intel Core( TM) i3-2330M@ 2. 20GHz,内存: 4GB; 软件采用 C++ 编程实现。

图 1 实验平台
3 、实验结果与分析
分别用 Computar 镜头 a 和艾菲特 BT-2316 镜头 b为光学系统,每种镜头采集的图像存为一组,每组采集10 次,每次以深度离焦—轻度离焦—聚焦—轻度离焦—深度离焦为一个周期,这样获取了两组图像数据。图 2 给出了铣刀在一个调焦周期中的三种调焦状态的图像,分别为深度离焦图像、轻度离焦图像和聚焦图像。
图 2 三种聚焦状态的铣刀图像
用梯度平方函数对图像内所选择的区域进行计算,将所得的数据存入文件,用软件对生成的数据文件进行分析和绘图,同时记录多次调焦过程中的 Tenen-grad 梯度函数值的变化,测试调焦函数值的抖动情况。因不同镜头对同一目标成像的最佳聚焦位置不同,为了便于对比研究,将两条曲线的最佳对焦位置横坐标对齐,得到归一化的 Tenengrad 函数曲线,如图 3 所示。

图 3 两类镜头环境下 Tenengrad 函数曲线归一化
将 Tenengrad 函数曲线进行特性曲线性能分析,分别计算两类镜头下的清晰度比率、灵敏度、局部极值因子、陡峭区宽度和陡峭度,计算结果如表 1 所示,对于调焦函数曲线,评价指标 R 值越大,分辨率越强; SEN值越大,灵敏度越高; LEF 值越小,鲁棒性越好; Ws越小,曲线性越好; S 值越大,分辨力越强。
表 1 两类镜头下 Tenengrad 函数曲线性能对比
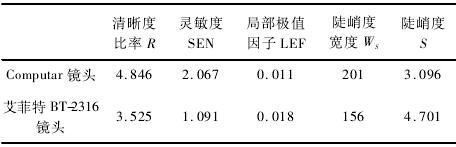
由表 1 中的数据可知,Computar 镜头对应的 R 值、SEN 值和 LEF 值三方面是相互统一的,非远心镜头在清晰度比率、灵敏度和局部极值因子三个指标下均明显高于远心镜头,清晰度比率高出 27% ,灵敏度高出47% ,局部极值因子高出 38% ,可以看出非远心镜头在分辨率、灵敏度和鲁棒性特性上占优势; 而艾菲特BT-2316 镜头在陡峭区宽度和陡峭度指标下占劣势,Ws低于远心镜头 22% ,S 值低于远心镜头 34% ,可以看出远心镜头在曲线性和不同程度离焦图像的分辨率方面弱于远心镜头。
本实验室研发的在线测量系统应用于复杂工业环境时,存在机床振动或干扰等特点,这不仅要求有良好的分辨率和灵敏度,对干扰的敏感程度的要求更高,即聚焦函数的鲁棒性更具优越性,所以优先选择分辨率、灵敏度和鲁棒性均占优势,同时成本更低的非远心镜头。
4 、结论
为解决视觉测量系统中调焦模块的远心镜头导致的系 统 复 杂 度 和 成 本 的 增 加 问 题,本 文 采 用 Te-nenegrad 函数,该调焦函数可用于实验室的视觉测量系统的调焦模块,分析对比了远心镜头和非远心镜头两类镜头环境下的聚焦函数调焦特性,以实验室自主研发的“刀具测量仪”中的调焦模块为实验平台,采用多项评价指标对评价函数进行实验对比研究,发现非远心镜头的分辨率、灵敏度和鲁棒性性能更优,远心镜头的陡峭区宽度和陡峭度即曲线性更好,基于在线测量系统应用于复杂工业环境的特点,应选择分辨率、灵敏度和鲁棒性均占优势,同时成本更低的非远心镜头。同时此对比研究为实践中的调焦系统和视觉测量系统设计提供一定理论指导,为镜头的权衡和调焦实际应用提供参考。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

