



当 AI 遇上机械臂?NVIDIA 再破局,让下一代机器人技术触手可及
2024-10-8 来源:- 作者:-
在工业应用中,机械臂很长一段时间都被当作一个特定动作的强执行机构使用,例如在固定场景下进行定点上下料、搬运、焊接、涂胶等动作,但我们的世界并不是一条可预测的生产线。
近几年,人们对个性化的需求越来越高,普通流程化制造的商品越来越难以满足需求,小批量、多品种的趋势席卷了汽车、电子、家电等各类消费品,一体化、柔性化成为了机器人行业及制造业发展的主流趋势。在此背景下,机械臂也正经历着从单一功能向多功能、从固定场景向灵活应用的深刻转变,朝着更智能的方向发展。
目前,机械臂技术在高精度和可重复性方面取得了显著进展,然而,这种出色的精度往往未能有效地转化为对许多日常物体的操纵能力,这为机器臂开发乃至整个行业都带来了新的挑战,AI 的到来或许能够破局。
以打造 AI 芯片而闻名,近年来,AI 的蓬勃发展已使 NVIDIA 成为全球最具价值的公司之一。在今年 3 月的 GTC 上,NVIDIA 创始人兼首席执行官黄仁勋将机器人称为“物理形态的人工智能”,并预言,机器人将成为“AI 发展的下一波浪潮”,会上发布的众多新品,向行业展示了其进军机器人赛道的决心。
针对机械臂,NVIDIA 发布了 Isaac Manipulator,可帮助开发商利用 AI 加快构建产品,AI 与机械臂的完美结合,也将有效推动机械臂在复杂任务执行上的边界能力。
力求为行业带来“智慧”机械臂
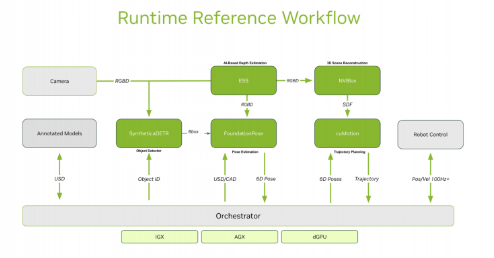
具体来看,NVIDIA Isaac Manipulator 是 NVIDIA 专为机械臂设计的一款综合性 AI 解决方案,可为机械臂提供一系列先进的运动生成和模块化 AI 功能,以及各种强大的基础模型和 GPU 加速库,可助力企业快速构建能够无缝感知、理解并与环境交互的机械臂,帮助企业加速解决在动态环境下的挑战。
图片来源:NVIDIA
Isaac Manipulator 的诞生并非偶然,而是 NVIDIA 在计算领域长期积累和创新的结果。Isaac Manipulator 充分利用了 NVIDIA 在 GPU 计算领域的深厚技术,其为机械臂提供的一系列 GPU 加速库能够显著提升机械臂路径规划、双目视觉深度感知、目标检测等关键任务的计算速度,这种加速能力使得机械臂能够在更短的时间内完成复杂任务,提高生产效率和响应速度。
除强大的 GPU 加速能力外,零样本感知是 Isaac Manipulator 进行目标检测的另一大技术亮点。在机器人技术领域,实现可泛化的机器人操纵一直是研究的热点。
为了实现可泛化的机器人操纵,传统机械臂在执行新任务时往往需要依赖于海量数据进行模仿学习,但是在真实场景中收集充足的机器人数据过于昂贵,导致成本问题显著。
而 Isaac Manipulator 先进的零样本感知技术,使机械臂能够在没有预先训练数据的情况下,快速适应新环境和新任务,这一技术突破极大地提高了机械臂的灵活性和适应性,且降低了企业的开发成本和周期。
Isaac Manipulator 还提供了一系列可定制的模块化 AI 组件,包括各种强大的基础模型、感知算法、运动规划等。
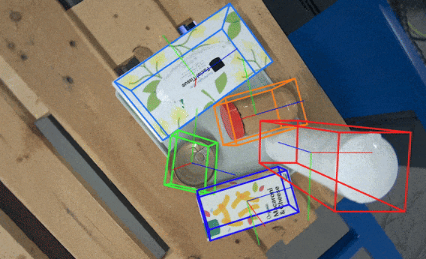
具体包括:用于对以前未见过的物体进行 6D 姿势估计和追踪的开创性基础模型 FoundationPose;通过同时运行多个轨迹优化来解决工业规模机器人运动规划问题的 GPU 加速运动规划器 cuMotion;基于 transformer,可对未知 3D 物体进行密集抓取预测的一种新的统一基础模型 FoundationGrasp(即将上市);可加快新对象的检测、渲染和训练速度的适用于室内环境的对象检测模型 SyntheticaDETR。
图片来源:NVIDIA

图片来源:NVIDIA
开发者可以根据具体任务需求自由组合这些组件,构建出最适合的解决方案。这种高度模块化的设计简化了开发流程,满足不同行业对机械臂智能化的需求,使机械臂能够更广泛地应用于各种工业制造场景,也为企业的数字化转型和智能化升级提供了有力支撑。
在真实场景下决胜最后 1 厘米
随着 AI 与机器人技术的飞速发展,机器人被誉为通往自动化的“最后一公里”,而让机器人技术触手可及的机械臂则是实现智能化操作的“最后一厘米”。基于 NVIDIA Isaac Manipulator,现代智能机械臂有望在工业制造、柔性物流、商用服务等场景中广泛落地。
在探讨机械臂技术的诸多方面时,末端执行器是其中尤为关键的一环。机械臂要真正实现类人手臂般的作业,末端执行器的抓取、放置、远程操作等多样化用途显得尤为重要。然而,开发经济实惠、易于使用且功能丰富的末端工具仍是科研人员面临的一大问题。
Alphabet 旗下软件和 AI 机器人子公司 Intrinsic 在今年 5 月份芝加哥举行的 Automate 展会上,重点展示了由 Isaac Manipulator 赋能的基础模型在推进机器人末端执行器开发上的技术突破。
Intrinsic 在其跨机器人软件平台中成功测试了 Isaac Manipulator,向行业展示了一种可扩展且普适的机器人抓握潜力,这种技能可以作用于不同的抓手、环境和物体,使机械臂实现与人手臂相仿的灵活性。

图片来源:Intrinsic
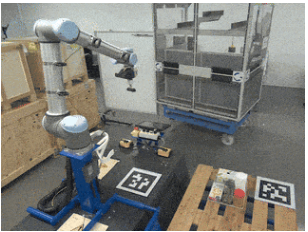
据介绍,借助 NVIDIA Omniverse 平台上的 NVIDIA Isaac Sim,Intrinsic 利用金属板和吸力抓手 CAD(计算机辅助设计)模型生成了真空抓取的合成数据,以此创建出了一个原型。
该原型使用 Intrinsic Flowstate 实现流程可视化、相关感知和运动规划,通过一套包含 Isaac Manipulator 的工作流,生成抓取姿势和由 CUDA 提供加速的机器人运动。这些运动先通过 Isaac Sim 进行仿真评估以节省成本,随后再通过 Intrinsic 平台部署到现实世界中。这一测试也充分验证了 Isaac Manipulator 在机械臂开发上的卓越性。
作为工业机器人的重要分支,协作机器人已成为机器人产业的必争之地,而提高协作机器人的性能更是推动整个行业技术进步的关键。
近些年,全球协作机器人巨头优傲机器人一直在加强其产品的 AI 能力,该公司与 NVIDIA 在 AI 领域有着深度合作。据悉,优傲机器人正在将 Isaac Manipulator 集成到其 PolyScope X 软件平台中,以解锁新的协作机器人解决方案。
图片来源:优傲机器人
PolyScope X 作为优傲机器人的软件平台,已经支持多样化的编程方式和灵活部署,为用户提供了便捷的操作体验,集成更多先进的 AI 功能后,将给整个行业带来更强大、更智能的机器人解决方案。
而 Isaac Manipulator 作为先进的 AI 工具,具有强大的路径规划和抓取姿势生成能力,如果成功集成到 PolyScope X 软件平台,将显著提升优傲机械臂的自动化水平和灵活性。
此外,cuMotion 路径规划器利用 NVIDIA GPU 的并行处理能力,不仅可以自动计算无碰撞轨迹的路径规划,还可以根据其他标准(如速度、最小磨损或能源效率)进行路径优化。
cuMotion、PolyScope X 和优傲协作机器人的结合将使一系列以前无法完全自动化的应用程序成为可能,它还可以改进现有的编程概念,对于客户来说,该技术可以简化常见工业应用的设置,促进机器人在高混合、低体积场景中的采用,大大提高自动化客户的效率。
写在最后
中国机械臂市场规模近年来呈现出显著的增长趋势。据市场研究机构数据显示,2022 年我国机械臂市场规模接近 178.3 亿元,2023 年市场规模增至 186.4 亿元。随着全球制造业升级和自动化需求的推动,机械臂在汽车制造、电子制造、物流仓储等领域的应用将持续扩大,预计到 2025 年,国内机械臂市场规模总值将超过 200 亿。
而 AI 技术对机械臂开发的重要意义在于,它赋予了机械臂更高级别的智能化能力,使其能够感知、理解和适应环境,执行更复杂和精细的任务。NVIDIA Isaac Manipulator 为机械臂的创新和发展提供了强大的技术支持,它也为机械臂开辟了更广阔的应用前景。
随着科技的融合应用,未来的机械臂将不仅仅是执行简单任务的工具,更将成为智能制造系统中的决策者和协调者。在这种发展趋势下,只有不断提升机械臂的控制精度和智能水平,才能满足未来复杂生产环境的需要,让机械臂在汽车制造、3C 电子、医疗、物流等关键细分市场大有作为。
投稿箱:
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
如果您有机床行业、企业相关新闻稿件发表,或进行资讯合作,欢迎联系本网编辑部, 邮箱:skjcsc@vip.sina.com
更多相关信息

